Mata pelajaran Informatika di SMP Xaverius Kotabumi dirancang untuk membekali siswa dengan keterampilan berpikir kritis, kreatif, dan inovatif dalam menghadapi era digital. Kurikulum Merdeka memberikan pendekatan pembelajaran yang fleksibel dan kontekstual, sehingga siswa dapat memahami dan mengaplikasikan konsep Informatika dalam kehidupan sehari-hari.
Materi yang dipelajari dalam Informatika kelas 8 mencakup berbagai elemen penting:
📌 Berpikir Komputasional (BK)
Mengembangkan pola pikir sistematis dalam memecahkan masalah melalui konsep dekomposisi, abstraksi, pengenalan pola, dan algoritma.
📌 Teknologi Informasi dan Komunikasi (TIK)
Memahami dasar-dasar teknologi digital, perangkat keras dan lunak, serta penggunaan teknologi dalam kehidupan sehari-hari.
📌 Sistem Komputer (SK)
Mempelajari komponen utama sistem komputer, termasuk perangkat keras, perangkat lunak, serta cara kerja komputer dalam memproses data.
📌 Jaringan Komputer dan Internet (JKI)
Mengenalkan konsep jaringan komputer, internet, protokol komunikasi, keamanan jaringan, serta etika berinternet.
📌 Analisis Data (AD)
Mengenal konsep pengumpulan, pengolahan, dan visualisasi data untuk menghasilkan informasi yang bermanfaat.
📌 Algoritma dan Pemrograman (AP)
Mempelajari konsep dasar algoritma serta pengenalan pemrograman sebagai keterampilan dasar dalam membangun solusi digital.
📌 Dampak Sosial Informatika (DSI)
Menganalisis dampak teknologi terhadap masyarakat, etika digital, keamanan siber, dan isu-isu terkait hak digital.
📌 Praktika Lintas Bidang (PLB)
Mengintegrasikan konsep Informatika dalam berbagai bidang studi lain melalui proyek dan eksplorasi teknologi dalam konteks nyata.
📌 Akses Materi Sekarang!
Kunjungi halaman ini secara rutin untuk mendapatkan pembaruan materi terbaru dan informasi seputar pembelajaran Informatika di SMP Xaverius Kotabumi.
🚀 Selamat belajar dan eksplorasi dunia digital bersama Informatika SMP Xaverius Kotabumi!
Aktivitas Berpasangan
Aktivitas AD-K8-02: Membuat Chart
Setelah kalian mempelajari berbagai jenis chart yang ada dan memahami
bagaimana cara membuatnya, pada aktivitas kali ini, kalian akan belajar
untuk membuatnya secara langsung. Kalian akan diberikan sebuah data dan
ikuti perintah yang ada.
Langkah:
Buatlah lembar kerja. Ketiklah data kedatangan penumpang pesawat
udara di beberapa bandar udara pada tahun 2017 dari bulan Januari
sampai dengan April,
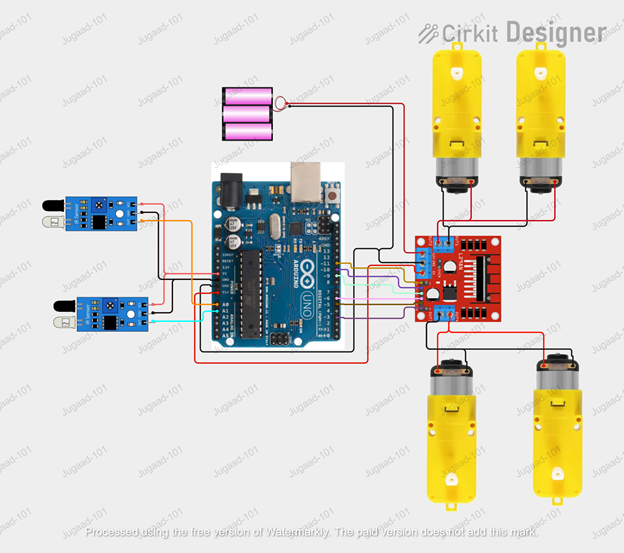
KODE LINE FOLLOWER
// Pin Definitions
#define leftSensorPin A0 // Analog pin A0 for left IR sensor
#define rightSensorPin A1 // Analog pin A1 for right IR sensor
#define ENA 11 // PWM pin for left motor speed
#define IN1 10 // Left motor forward
#define IN2 9 // Left motor backward
#define ENB 3 // PWM pin for right motor speed
#define IN3 6 // Right motor forward
#define IN4 5 // Right motor backward
void setup() {
// Set motor control pins as output
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Set IR sensor pins as input
pinMode(leftSensorPin, INPUT);
pinMode(rightSensorPin, INPUT);
// Initialize motors at full speed
analogWrite(ENA, 255); // Full speed for left motor
analogWrite(ENB, 255); // Full speed for right motor
}
void loop() {
// Read sensor values
int leftSensorValue = analogRead(leftSensorPin);
int rightSensorValue = analogRead(rightSensorPin);
// Convert analog values to binary-like thresholding
bool leftOnLine = leftSensorValue > 512; // Threshold, adjust as needed
bool rightOnLine = rightSensorValue > 512; // Threshold, adjust as needed
// Move forward if both sensors are on the line (black surface)
if (leftOnLine && rightOnLine) {
moveForward();
}
// Turn right if the left sensor is on the line and the right sensor is off
else if (leftOnLine && !rightOnLine) {
turnRight();
}
// Turn left if the right sensor is on the line and the left sensor is off
else if (!leftOnLine && rightOnLine) {
turnLeft();
}
// Stop if both sensors are off the line (white surface)
else {
stopMoving();
}
}
void moveForward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW); // Left motor forward
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW); // Right motor forward
}
void turnRight() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH); // Left motor backward (turn right)
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW); // Right motor forward
}
void turnLeft() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW); // Left motor forward
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH); // Right motor backward (turn left)
}
void stopMoving() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW); // Stop left motor
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW); // Stop right motor
}